The field of robotics has witnessed significant advancements in recent years, with the development of microbots that can interact with and manipulate their surroundings at the microscopic level. One of the most exciting breakthroughs in this area is the creation of magnetically controlled microbots that are small enough to diffract visible light. This innovation has the potential to revolutionize the way we probe the microscopic world, enabling new forms of imaging and manipulation that were previously impossible. In this article, we will delve into the details of this technology, exploring its technical specifications, capabilities, and potential applications.
Introduction to Magnetically Controlled Microbots

The development of microbots that can operate at the scale of visible light has been a long-standing challenge in the field of robotics. To achieve this, researchers have had to overcome significant technical hurdles, including the creation of micro-scale actuators, sensors, and control systems. One approach that has shown promise is the use of magnetic fields to control the movement and behavior of microbots. By encoding magnetic information into micro-scale robotics, researchers have been able to create microbots that can be manipulated using external magnetic fields.
At Cornell University, a team of researchers led by Paul McEuen has made a significant breakthrough in this area, creating magnetically controlled microbots that operate at the visible-light diffraction limit. These so-called diffractive robots are capable of interacting with and shaping light in ways that were previously impossible, enabling new forms of imaging and manipulation. According to McEuen, “A walking robot that’s small enough to interact with and shape light effectively takes a microscope’s lens and puts it directly into the microworld. It can perform up-close imaging in ways that a regular microscope never could.”
Technical Specifications and Capabilities
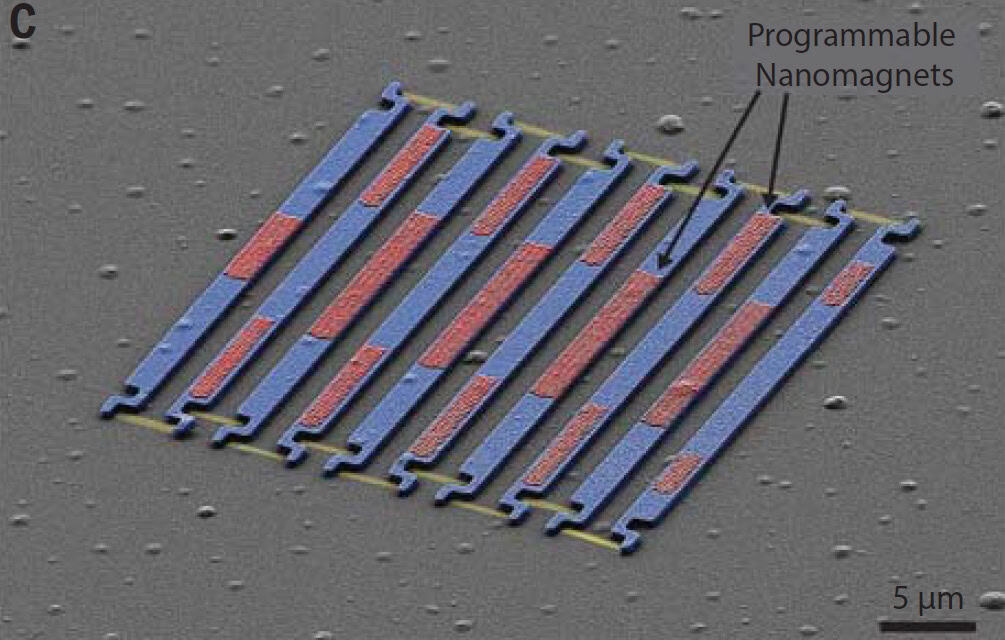
The microbots developed by McEuen and his team are composed of nanometer-scale mechanical membranes, rigid panels, programmable nanomagnets, and diffractive optical elements. The core elements of the diffractive microbots comprise the light-diffracting panels with integrated nanomagnet arrays and the flexible hinges. The platform can also embed optical elements such as an optical diffraction grating. To enable the required mechanical, diffractive, and magnetic performance, these integrated elements span several orders of magnitude in terms of their individual scales.
Key Components and Their Functions
The light-diffracting grating panels are tens of microns in size, with each panel 1 µm wide, whereas the diffractive grating lines are on the scale of light wavelengths. The hinges have a thickness of 5 nm, and the magnetic domains are in the nanoscale realm. The hinges play a crucial role in providing a high degree of flexibility to an otherwise rigid robot, allowing the microbots to rotate and reorientate themselves to dynamically change how light is diffracted, focused, and redirected.
When manipulated with a magnetic field, the microrobots are able to simultaneously change shape, locomote along a surface, and control diffracted light. This locomotion capability is a key feature of the microbots, enabling them to move and interact with their surroundings in a highly controlled and precise manner. The ability to control the microbots using magnetic fields also opens up new possibilities for their use in a wide range of applications, from biomedical imaging to materials science.
Potential Applications and Implications

The development of magnetically controlled microbots that can diffract visible light has significant implications for a wide range of fields, from biomedical imaging to materials science. One of the most exciting potential applications is in the area of biomedical imaging, where the microbots could be used to image and manipulate cells and tissues at the microscopic level. This could enable new forms of diagnosis and treatment, such as the use of microbots to deliver targeted therapies or to image and remove cancer cells.
Biomedical Imaging and Manipulation
The ability to image and manipulate cells and tissues at the microscopic level has the potential to revolutionize the field of biomedical imaging. The microbots could be used to image and remove cancer cells, deliver targeted therapies, or to study the behavior of cells and tissues in real-time. This could enable new forms of diagnosis and treatment, and could potentially lead to significant advances in our understanding of the underlying biology of disease.
In addition to biomedical imaging, the microbots could also be used in a wide range of other applications, such as materials science, where they could be used to manipulate and image materials at the microscopic level. This could enable new forms of materials synthesis and characterization, and could potentially lead to significant advances in our understanding of the properties and behavior of materials.
Conclusion

In conclusion, the development of magnetically controlled microbots that can diffract visible light is a significant breakthrough in the field of robotics. These microbots have the potential to revolutionize the way we probe the microscopic world, enabling new forms of imaging and manipulation that were previously impossible. With their ability to interact with and shape light, the microbots could be used in a wide range of applications, from biomedical imaging to materials science. As research in this area continues to advance, we can expect to see significant advances in our understanding of the microscopic world, and the development of new technologies and applications that were previously unimaginable. The future of robotics is likely to be shaped by the development of microbots like these, and it will be exciting to see where this technology takes us in the years to come.
Add Comment